Zusammenbau und Test des "Hindernisläufers"
Es hat nun ein paar Tage gedauert, bis ich den Roboter zusammenbauen konnte. Aber nun ist es soweit und es geht an die Arbeit.

Aus diesem "Durcheinander" sollte ein funktionierender Roboter entstehen. Als erstes habe ich mir eine Halterung für den Ultraschallsensor mit meinem CTC Drucker gedruckt. Die Vorlage stammt von Thingiverse und ist hier zu finden: Ultrasonic Sensor and Servo Brackets
Ich habe dann so nacheinander die Module, Batteriehalterung usw. eingebaut. Zum Aufbau der Platinen habe ich meine (schon vor längerem gedruckte) Abstandshalter in M3 oder M4 benutzt. Auch diese Vorlage gibt es bei meiner viel benutzen Quelle: Set of Hex Spacer M3/M4.
Es gibt zwar viele schon gebohrte Löcher auf der Grundplatte, aber man kann nicht alle benutzen. So habe ich dann mir noch ein paar Löcher dazu gebohrt.
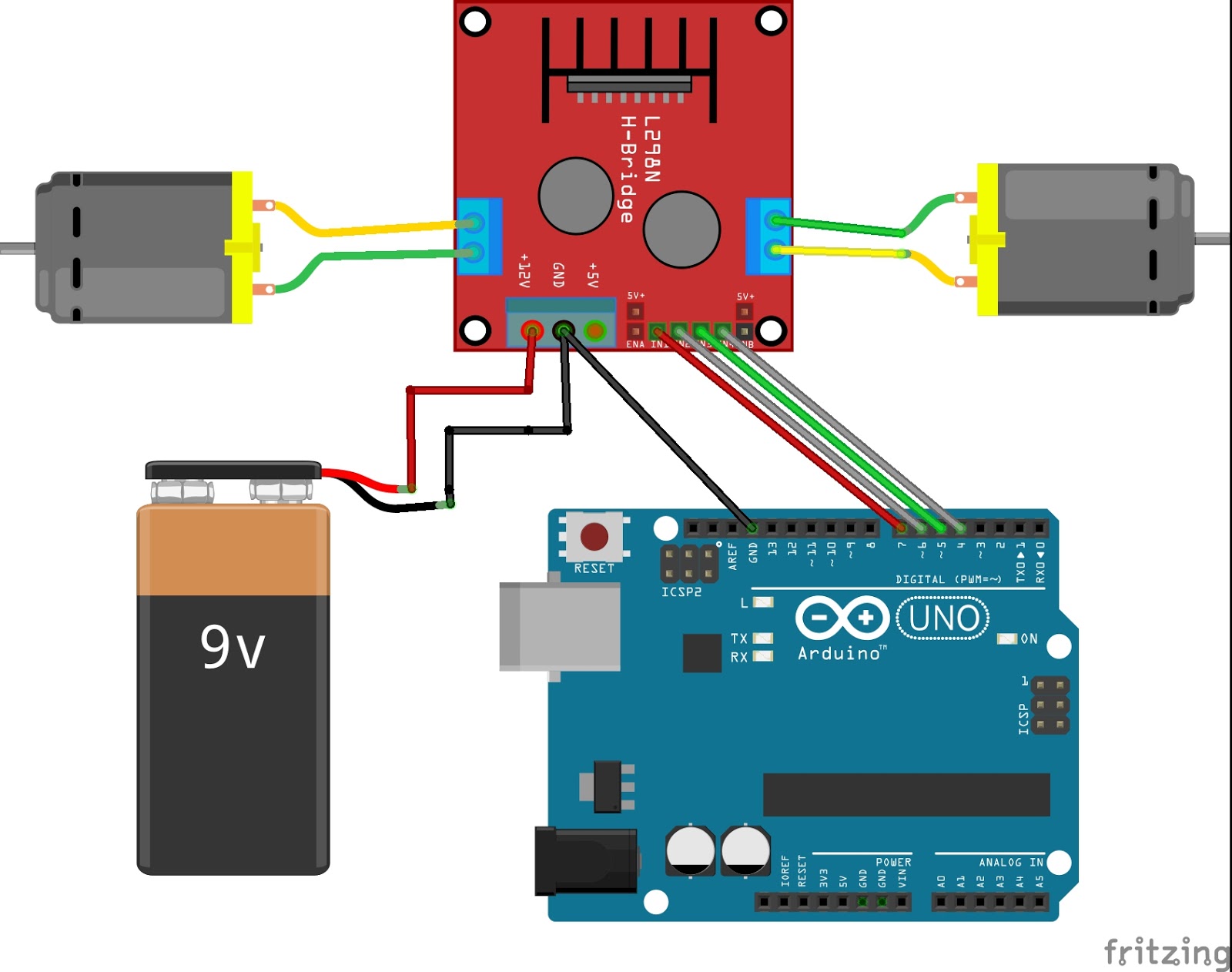
Angeschlossen habe ich alles nach folgenden Plänen:
Ich habe dabei immer wieder die Funktionen überprüft. Auch dabei gab es keine Probleme. Den entstandenen "Drahtverhau" habe ich dann mit vielen Kabelbindern versucht zu bändigen. Ich denke, der Roboter kann sich sehen lassen.

In meiner Werkstatt habe ich Bodenplatten mit Fugen. Und das hat mir dann doch beim ersten Lauftest etwas Probleme bereitet. Eine der AA Batterien ist immer wieder aus der Halterung gefallen. Mit einem Kreppband habe ich die Batterie dann gesichert und konnte dann weiter probieren.
Die Aufnahmen im Video habe ich in meinem Flur gemacht, der einen glatten Boden hat. Der Test hat gezeigt, dass ich noch etwas an der Einstellung und der Empfindlichkeit des Ultraschall Sensor arbeiten muss. Nicht immer hat mein "Hindernisläufer" vor der Hürde gestoppt - es gab da so ein paar kleine Zusammenstösse. Aber das ist alles im Video zu sehen.
 |
| Links: LN298N Motor Treiber - Mitte: Servo Motor - Rechts: Ultraschall Sensor |

In meiner Werkstatt habe ich Bodenplatten mit Fugen. Und das hat mir dann doch beim ersten Lauftest etwas Probleme bereitet. Eine der AA Batterien ist immer wieder aus der Halterung gefallen. Mit einem Kreppband habe ich die Batterie dann gesichert und konnte dann weiter probieren.
Die Aufnahmen im Video habe ich in meinem Flur gemacht, der einen glatten Boden hat. Der Test hat gezeigt, dass ich noch etwas an der Einstellung und der Empfindlichkeit des Ultraschall Sensor arbeiten muss. Nicht immer hat mein "Hindernisläufer" vor der Hürde gestoppt - es gab da so ein paar kleine Zusammenstösse. Aber das ist alles im Video zu sehen.
|