Eigenlich sollte der Eggbot/Spherebot schon an Ostern die Eier bemalen. Aber da kam vieles dazwischen und ich habe das Projekt ganz neu angefangen.
Also noch einmal von vorne.
Die Vorlage zu dem Projekt kommt von Thingiverse. SphereBot - Full project. Wie ich dann die einzelnen Teile gedruckt habe, kann man im alten Artikel nachlesen. Das will ich uns hier ersparen. In vielen Kommentaren zu den Bauanleitungen im Internet wird oft das Fehlen einer Stückliste und genauere Angaben zu Größe und Abmessung bemängelt. Ich habe nun versucht, hier eine vollständige Liste der benötigten Bauteile mit weiteren Informationen zusammen zu stellen.
Den Aufbau der Halterung kann man am besten im dazugehörigen Video verfolgen.
Aufbau der Motorhalterung:

Seitenhalterung 3D gedruckt 2x
Träger für Servo- und Stifthalterung 3D gedruckt 1x
M8 x 220 mm Gewindestange 3x
M8 Muttern 16x
M8 Unterlegscheiben 6x
M8 Federscheiben 10x
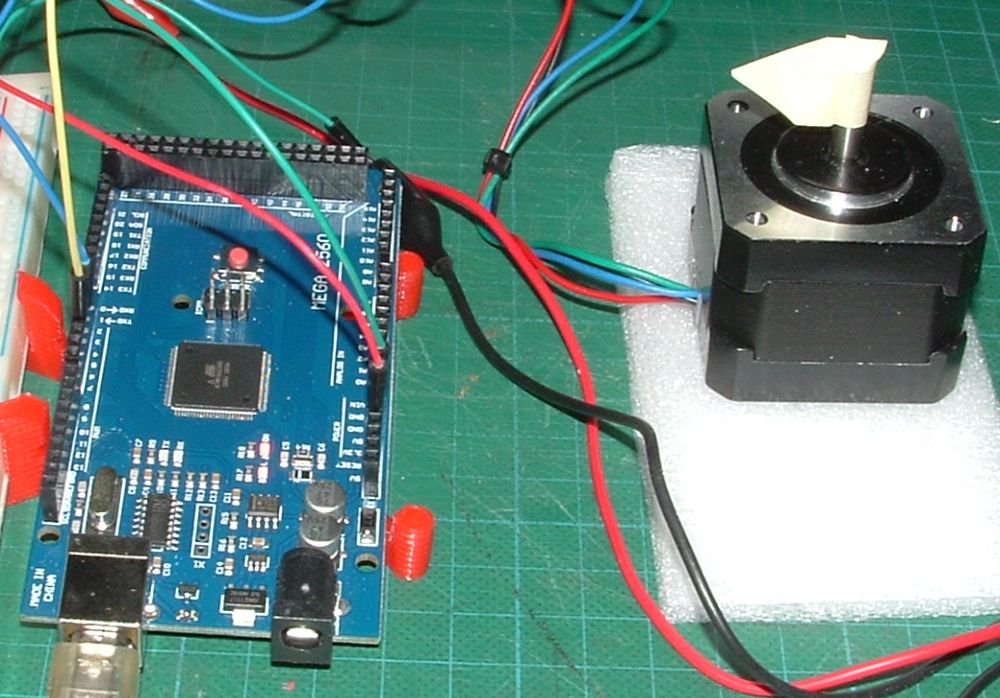
Einbau der NEMA 17 Motoren:

NEMA 17 Motor 2x
M3 x 10 mm Schraube 4x
M3 x 12 mm Schraube 4 x
M3 Unterlegscheiben 8x
Einbau der Kugellagerhalterung:

Kugellagerhalterung 3D gedruckt 2x
Kugellager 608ZZ 2x
M3 x 25 mm Schrauben 4x
M3 Muttern 4x
M3 Unterlegscheiben 8x
Aufbau des Stifthalters und des Servo-Motors:

Stifthalter 3D gedruckt 3(4) Teile
M4x40 mm Schraube 2x
M4x20 mm Schraube 3x
M4x10 mm Schraube 1x
M4 Muttern 5x
M4 Sicherungsmutter 1x
M4 Unterlegscheiben 4x
Servo Motor SG90 1x
Montagematerial für Servo
Zugfeder 1x
Auf dem Bild fehlen 1x M3x10mm
Schraube und eine M3 Mutter

Noch nicht eingebaut wurde die Feder und das Horn am Servo. Auch die Halterungen für die zu bemalenden Eier/Bälle wird erst nach dem Elekroniktest angebracht.
Im 2. Teil werde ich dann die Elektronik zusammenbauen (löten), die Firmware installieren und die Software einrichten.
Ich hoffe, dass diese 2. Folge nicht mehr so lange dauert - die Weihnachstskugeln warten.
|