

Auf bau der DC Motoren und erster Test der Motorsteuerung mit dem L298N Baustein.
Den schon im Beitrag "Ausgepackt und Angepackt - Roboterbausatz mit L298N Motorsteuerung" vorgestellten Bausatz habe ich nun angepackt und die beiden Motoren auf der Grundplatte befestigt. Da gab es einige Vorbereitungen dazu, die kann man aber im dazugehörigen Video verfolgen..
Der Zusammenbau war kein Problem und so ging es an's Ausprobieren der Motoren. Ich habe nach folgendem Bauplan die benötigten Teile zusammengestellt und verbunden:
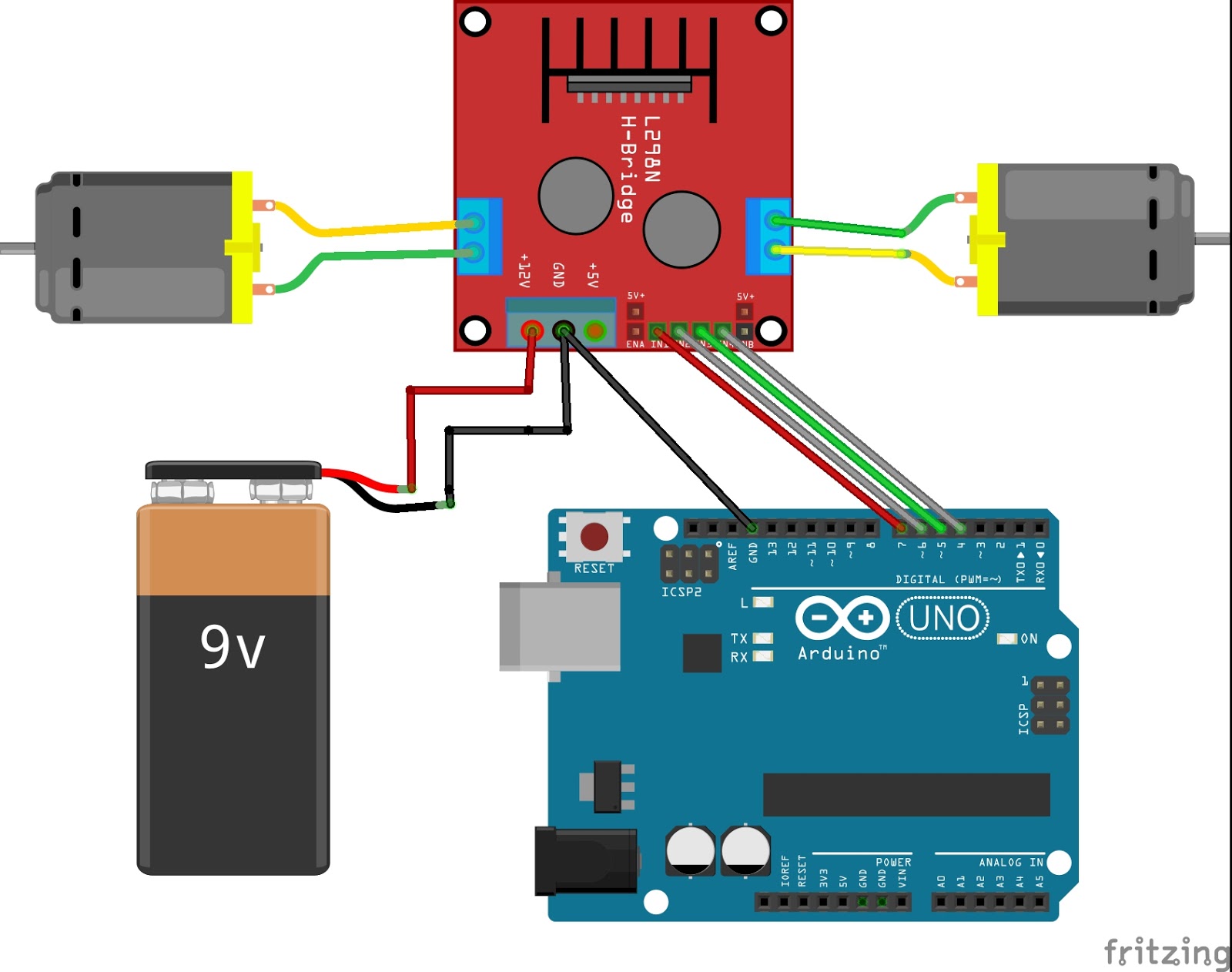 |
| Aufbau zum Test der Motoren |
Hier eine kurze Zwischeninformation.
Da ich das Rad nicht zum zigsten Mal erfinden will, berichte ich im Beitrag und Video nur über den praktischen Ablauf des Aufbaus. Im Internet und auf Youtube gibt es zahlreiche Hinweise und Informationen zum Bau solcher Roboter. Bei Mert Arduine and Tech habe ich Informationen gefunden, mit denen ich arbeiten will. Und von dieser Seite habe ich auch den Arduino Code benutzt:
Youtube: Arduino Project 10: Obstacle Avoiding Robot using L298N (Video mit Erklärung)
Webseite: Mert Arduino and Tech (hier gibt es den Code)
Der "Mert Arduino" macht mit seinen Videos und seiner Webseite einen großartigen Job und Interessenten sollten unbedingt seinen Kanal abonnieren.
Wie also oben erwähnt, benutze ich den Arduino Code von der angegebenen Webseite. Es funktionierte aber nicht auf Anhieb. Wo war das Problem? Und auch hier fand ich die Lösung in dem oben angegebenen Video. Meine 9 V Batterie war viel zu schwach und konnte die erforderliche Leistung nicht erbringen. Nach dem Austausch der 9 V Batterie hat es dann aber funktioniert.
Und das ist auch das Ende des 1. Teils. Es wird weitergehen mit dem Aufbau der Elektronik und der Verdrahtung und Test des Ultraschall Sensors im 2. Teil dieser Serie.
|
Keine Kommentare:
Kommentar veröffentlichen
wecapp@t-online.de