Test des HC-SR04 Ultraschallseonsors und Funktionstest des Servomotors SG 90
Nach den ersten, zufriedenstellenden Ergebnissen wird in diesem Beitrag über den Test des Ultraschallsensors und des Servomotors berichtet. Den Teil 1 dieser Serie gibt es hier: Teil 1.
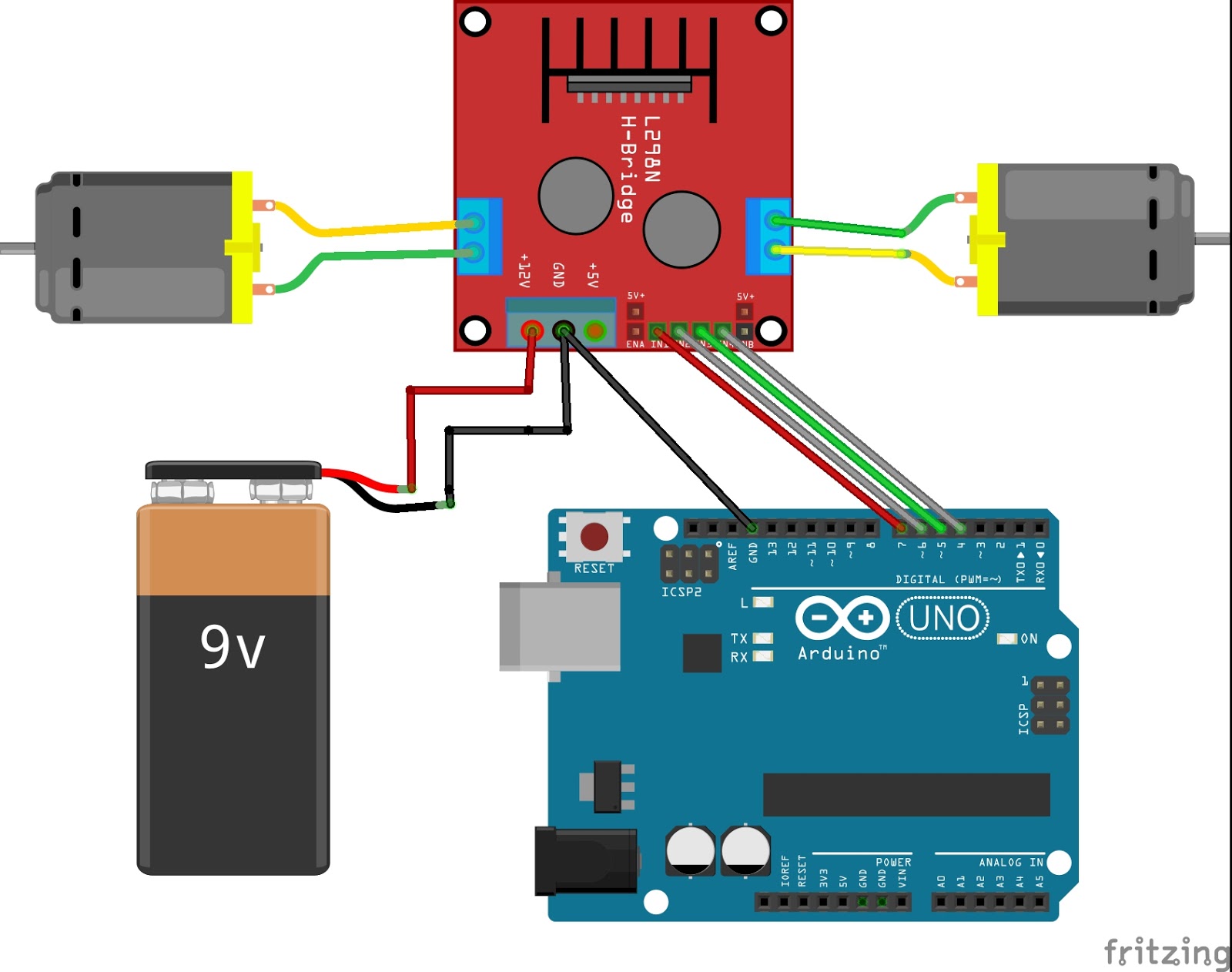
Angeschlossen werden die beiden Bauteile nach folgendem Plan:

| Servomotor SG 90 | Arduino |
| Braun | Ground |
| Rot | 5 Volt |
| Gelb | Pin 10 |
| Ultraschallsensor | |
| VCC Rot | 5 Volt |
| Trigger Weiß | Pin A1 |
| Echo Grün | Pin A2 |
| GND Schwarz | GND |
Diese Belegung entspricht dem Arduino Code, den ich für dieses Projekt verwende. Im ersten Teil habe ich schon den Link zur Youtube und Webseite von Mert angegeben. Hier ist er aber noch einmal. Ich empfehle, dieses Video genau anzuschauen und zu studieren. Da gibt es viele Hinweise und Lösungen für Projekte diser Art. Auch die weiteren Videos auf diesem Kanal sind hervorragend gemacht.
Im 3. Teil der Beitragsserie zeige ich dann meine Lösung zum mechanischen Aufbau aller Bauteile auf der Grundplatine und wohl auch den fertigen Roboter. Sollte es da noch zu Problemen kommen, steht eventuell noch ein weiterer Beitrag an.
Im folgenden Video zeige ich nun den Zusammenbau und den Test der Bauteile.
|