

Das Projekt des "Eier-Druckers" geht weiter und auf dem Labortisch habe ich einen Nema 17 Stepper Motor liegen. Dieser soll im Spherebot/Eggbot eingebaut und mit einem Arduino angesteuert werden.
Zum Test benutze ich ein Arduino Mega 2560, einen Nema 17 Steppermotor, den dazugehörigen Treiberbaustein A4988, einen Elko mit 47µF und ein Netzteil, das mir 8-30 Volt liefert.
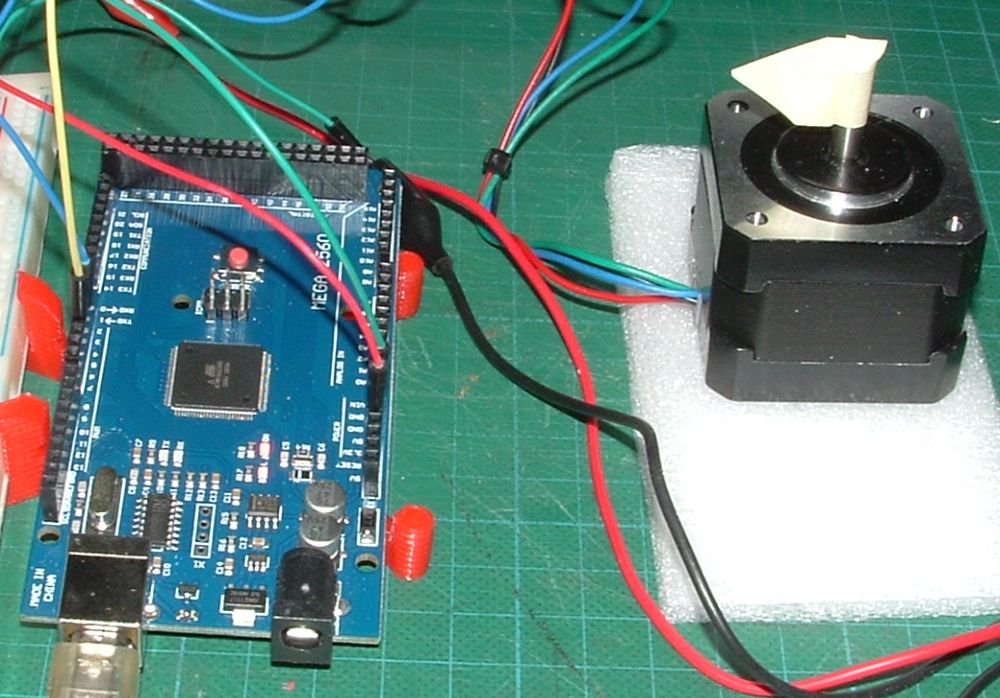
Ich habe den Versuch nach folgendem Bild aufgebaut:

Ein ganz kleines Problem gab es mit der Zuordnung der Anschlussdrähte am Motor. Da gibt es dann die Farben Blau, Grün, Rot und Schwarz und genau in dieser Reihenfolge (auf dem Bild von oben nach unten) wird der Motor mit dem A4988 verbunden.
 |
| 1: A4988 - 2:Arduino Mega 2560 - 3:bipolarer Stepper Motor Nema 17 |
Der Versuch zur Steuerung eines Stepper Motors basiert auf einer Beschreibung von Dejan Nedelkovsky und ist hier zu finden: How To Control a Stepper Motor with A4988 Driver and Arduino
Die Seite ist englischsprachig, aber dank der Bilder und des Youtube-Videos kann man den Versuch leicht nachbauen und ausprobieren. Ich habe auf dem Fritzing-Aufbauplan (oben), noch die Verbindung zwischen Reset und Sleep eingezeichnet. Die im Artikel vorgeschlagene Überprüfung der Strombegrenzung habe ich (noch) nicht gemacht.
Der Arduino Code ist auch auf der Webseite zu finden und kann dann dort leicht kopiert und in den Arduino übertagen werden. Das hat bei mir ohne Programmfehler funktioniert.
Damit sind nun die beiden Motoren ausgetestet und können in den Spharebot/Eggbot eingebaut werden. Das aber in einem anderen Artikel. Der Artikel mit dem ServoTest ist hier zu finden.
Und hier ein kleines Video mit dem Ergebnis des Versuchs:
Und hier ein kleines Video mit dem Ergebnis des Versuchs:
| Abstract: Control of a stepper motor with an Arduino |




